








Yaklaşık bir şişe mantarı büyüklüğündeki prototip yalnızca 43 x 26 x 28 milimetre boyutlarında. Motorları ve kontrol sistemi ise ağız dışında yer alıyor ve robota esnek miller, kablolar ve hortumlarla bağlanıyor.
İsviçre'deki Basel Üniversitesi araştırmacıları, gelecekte dişlerin kaplama için otomatik olarak hazırlanmasını sağlayabilecek minyatür bir diş robotu geliştirdi. Araştırmacılar, prototip aşamasındaki sistemin diş tedavilerinde gereken randevu sayısını azaltarak hastalara daha hızlı ve konforlu bir süreç sunabileceğini belirtiyor.
Robot, Basel Üniversitesi Biyomedikal Mühendisliği Bölümü ile Zürih Üniversitesi araştırmacılarının ortak çalışmasıyla geliştirildi. Çalışmanın sonuçları IEEE Transactions on Medical Robotics and Bionics adlı bilimsel dergide yayımlandı.
Kaplama tedavisini hızlandırmayı hedefliyor
Günümüzde dişe kaplama yapılması gereken hastalarda süreç genellikle birkaç randevu gerektiriyor. İlk seansta çürük temizleniyor, diş şekillendiriliyor, ölçü alınıyor ve geçici kaplama yerleştiriliyor. Kalıcı kaplama ise laboratuvarda üretildikten sonra bir diğer randevuda takılıyor.
Araştırmacıların geliştirdiği "MIR" (Miniature Intraoral Robot) adlı sistem bu süreci önemli ölçüde kısaltmayı amaçlıyor.
Tedavinin ilk aşamasında ağız içi tarama yapıldıktan sonra diş hekimi, robotun hangi bölgelerden ne kadar diş dokusu kaldıracağını dijital ortamda planlıyor. Aynı tarama verileri kullanılarak hem kalıcı kaplama sipariş ediliyor hem de robota özel ağız içi bir sabitleyici hazırlanıyor.
Bu sayede diş hazırlanırken hasta başını hareket ettirse bile robot ağız içindeki konumunu koruyabiliyor.
Kapak büyüklüğünde
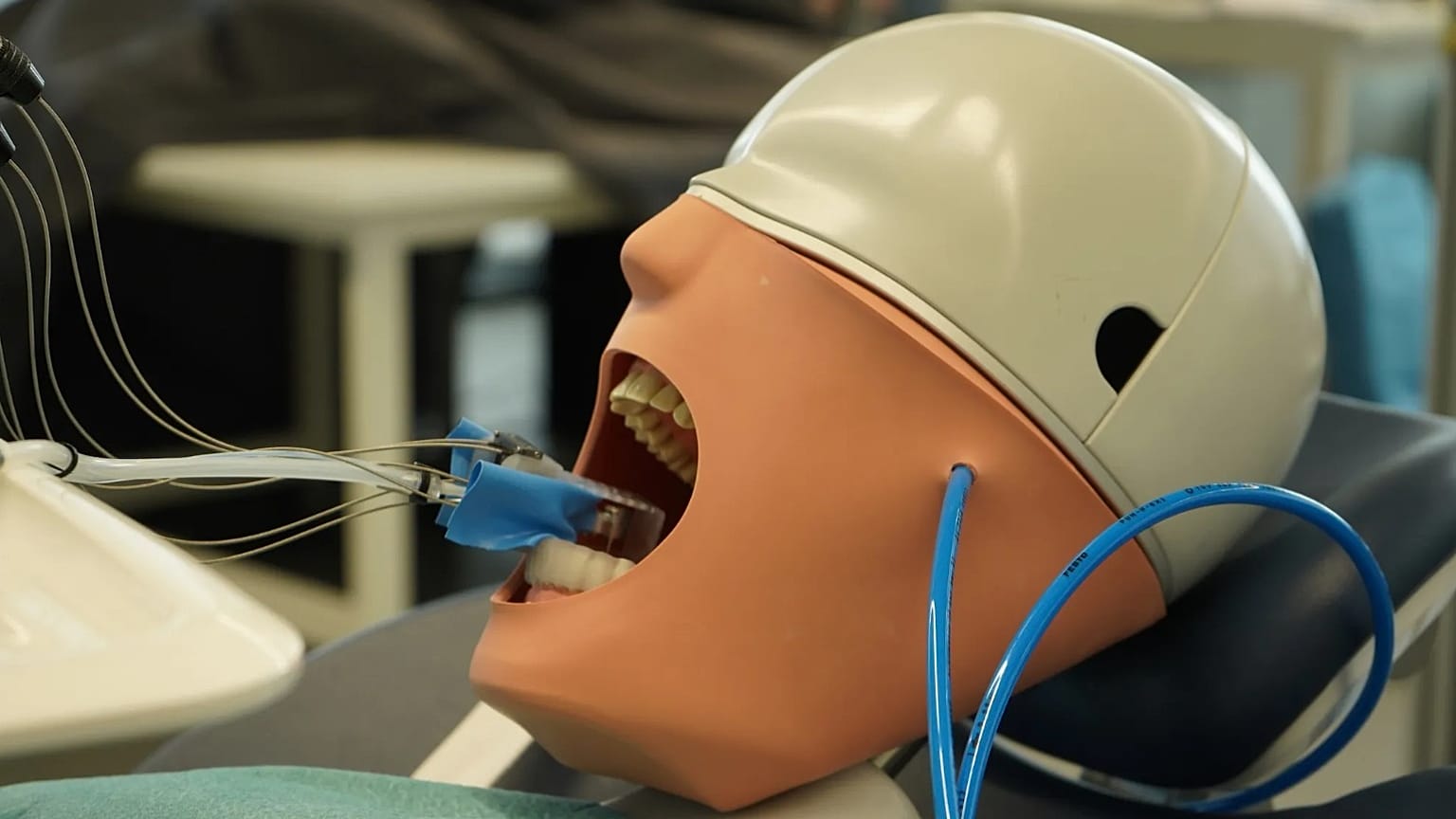
Araştırmacılar, robotun hastanın ağzına rahatça sığabilmesi için küçük tasarlandığını belirtiyor.
Yaklaşık bir şişe mantarı büyüklüğündeki prototip yalnızca 43 x 26 x 28 milimetre boyutlarında. Motorları ve kontrol sistemi ise ağız dışında yer alıyor ve robota esnek miller, kablolar ve hortumlarla bağlanıyor.
Çalışmanın başyazarı Dr. Yukiko Tomooka, sistemin açık bir ağız içinde rahatça çalışabilecek kadar küçük olacak şekilde tasarlandığını ifade etti.
Milimetrenin beşte biri kadar hata payı
Araştırmacılar robotu önce sentetik reçineden üretilmiş diş modelleri üzerinde, ardından sertliği diş minesine benzeyen seramik malzeme üzerinde test etti.
Robot dişi iki aşamada hazırlıyor. İlk aşamada geniş uçlu bir frezle dişin üst kısmındaki fazla doku kaldırılıyor. İkinci aşamada ise daha ince ve uzun bir frez, dişin yan yüzeylerini şekillendiriyor.
Henüz konumunu ölçen herhangi bir sensöre sahip olmamasına rağmen robotun epey hassas çalıştığı görüldü. Testlerde konum hatasının 0,2 milimetrenin altında kaldığı bildirildi.
Araştırmacılar sisteme sensörler eklendiğinde bu hata payının daha da düşmesini bekliyor.
Güvenlik için kuvvet ve gürültü de ölçülüyor
Ekip yalnızca hassasiyeti değil, robotun çalışma sırasında uyguladığı kuvveti de analiz etti.
Deneylerde frezin oluşturduğu kuvvet beş newtonun altında kaldı. Bu değer yaklaşık yarım litrelik bir su şişesinin ağırlığına karşılık geliyor.
Araştırmacılar ayrıca sistemin çıkardığı gürültü seviyesini de ölçerek robotun klinik ortamda kullanılmaya uygun olup olmadığını değerlendiriyor.
Bir sonraki hedef sensör ve kamera eklemek
MIR'ın diş kliniklerinde kullanılabilmesi için hâlâ geliştirilmesi gereken birçok özellik var.
Araştırma ekibi bir sonraki aşamada robota sensörler ve küçük bir kamera entegre etmeyi planlıyor. Böylece sistem tedavi sırasında kendi konumunu ve işlemin ilerleyişini gerçek zamanlı olarak takip edebilecek.